 NA-MIC Project Weeks
NA-MIC Project Weeks
Back to Projects List
NorMIT-Plan
Key Investigators
- Rafael Palomar (The Intervention Centre, Oslo University Hospital and NTNU).
- Andras Lasso (Laboratory for Percutaneous Surgery, Queen’s University)
- Jean-Christophe Fillion-Robin (Kitware Inc.)
Project Description
NorMIT-Plan is part of the Norwegian centre for Minimally Invasive Guided Threrapy (NorMIT). The centre offers resources for medical technology research in minimally invasive therapies. NorMIT-Plan is a software package developed as a set of 3D Slicer modules which will provide tools for segmentation, 3D modeling and surgical plannig for liver resection procedures.
In this project we will update the software to the latest 3D Slicer version, fix known bugs and create a 3D Slicer extension.
Objective
- Objective A. Design a new module layout.
- Objective B. Refactor old module elements using modern 3D Slicer infrastructure (Terminologies, Markups,…).
- Objective C. Make a plan to integrate generic tools into 3D Slicer infrastructure.
Approach and Plan
- Creation of a 3D Bezier Markup.
- Meetings to decide on an integration strategy.
Progress and Next Steps
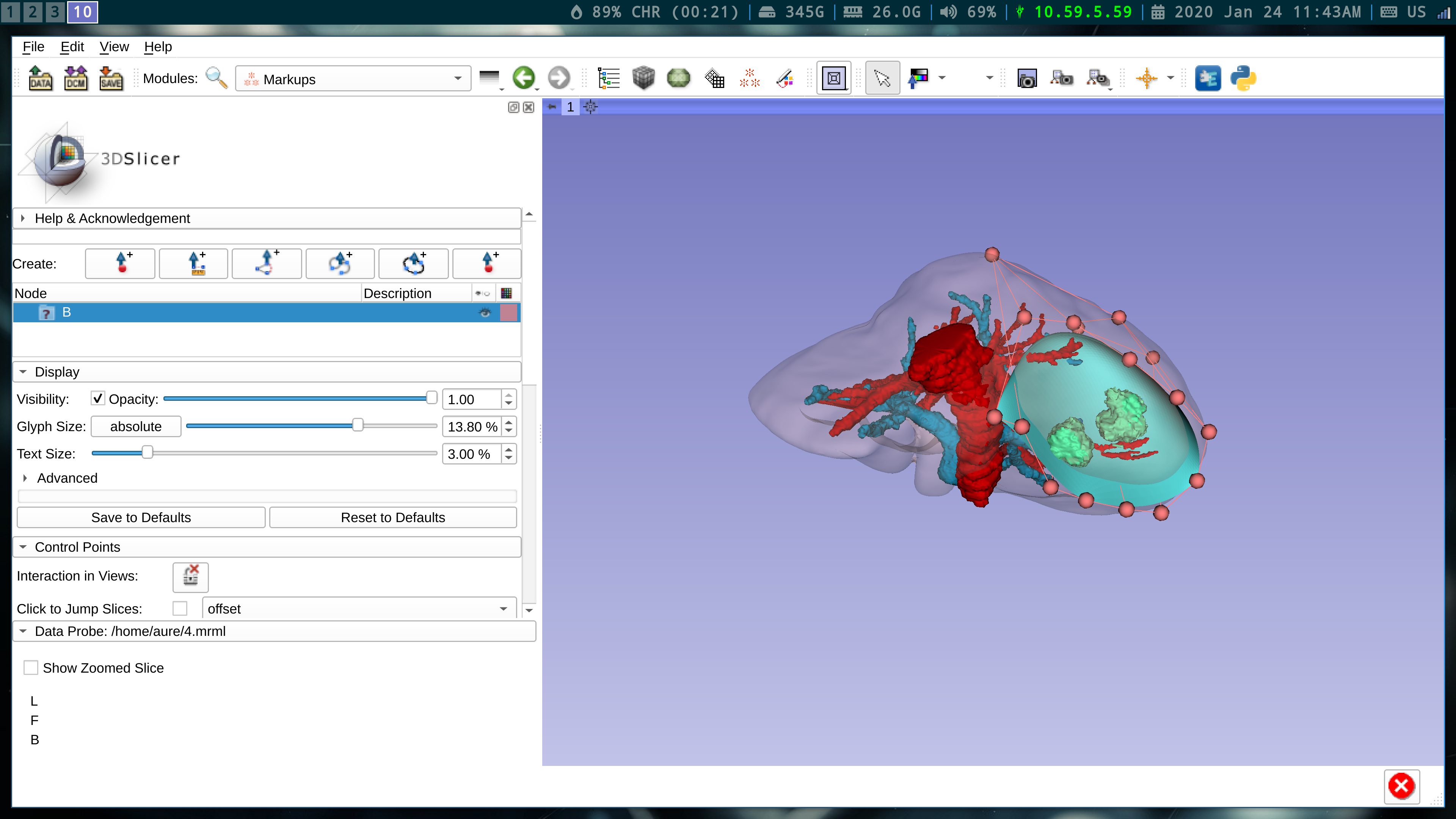
- A prototype of a new Markup (3D Bezier surface) has been developed.
- Plan to extend 3D Slicer infrastructure to allow third-party modules to register markups.
- Plan to develop a module and extend 3D Slicer with the generic tools (3D deformable surface markup).
Illustrations
Background and References
- Palomar, Rafael, et al. “A novel method for planning liver resections using deformable Bézier surfaces and distance maps.” Computer Methods and Programs in Biomedicine 144 (2017): 135-45.
- Palomar, Rafael, et al. “Surface reconstruction for planning and navigation of liver resections.” Computerized Medical Imaging and Graphics 53 (2016): 30-42.
- Kumar, Rahul P., et al. “Three-Dimensional Blood Vessel Segmentation and Centerline Extraction based on Two-Dimensional Cross-Section Analysis.” Annals of Biomedical Engineering 43 (2015): 1223-34.